解決方案
Turnkey Solution
乘用車
商用車
智慧通大數(shù)據(jù)
星火C1 主動(dòng)安全系統(tǒng)AEB
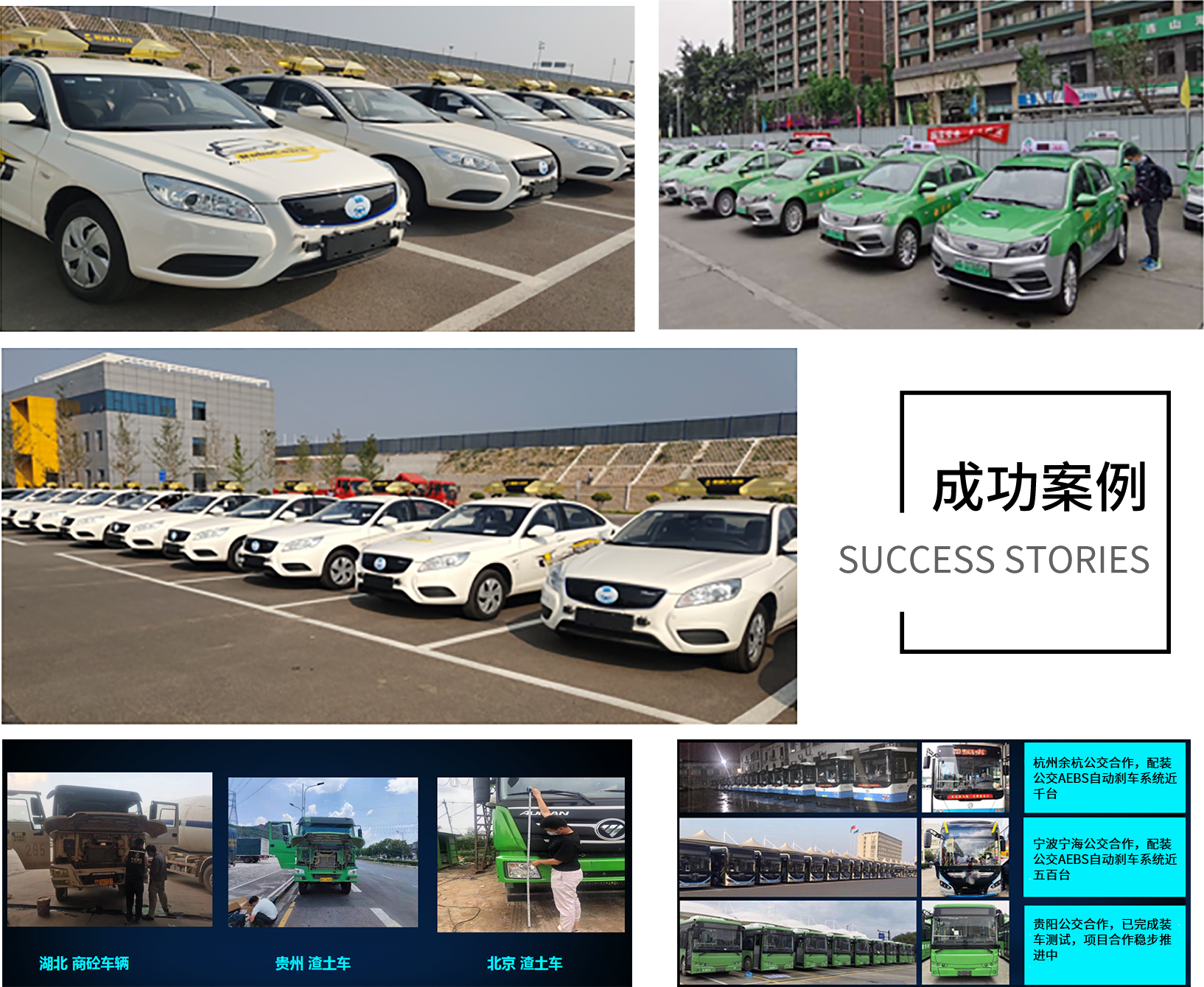
隨著汽車智能化網(wǎng)聯(lián)化技術(shù)的發(fā)展,越來越多的新技術(shù)應(yīng)用到城市出租車、網(wǎng)約車的安全駕駛上來。
目前的安全輔助駕駛系統(tǒng)主要是以監(jiān)控報(bào)警設(shè)備為主,例如前向碰撞報(bào)警、360 環(huán)視、駕駛員行為監(jiān)控等。
隨著技術(shù)的迭代更新,更多具備 AI 人工智能技術(shù)的設(shè)備在城市營運(yùn)車輛上得以應(yīng)用,讓城市出租車、網(wǎng)約車輛有了更可靠更先進(jìn)技術(shù)支撐的安全防控系統(tǒng)。
系統(tǒng)簡介
智慧通科技 乘用車星火C1主動(dòng)安全系統(tǒng),采用雙目立體視覺系統(tǒng)(包括雙目攝像頭)實(shí)時(shí)構(gòu)建出車輛行駛道路前方的三維空間場景,
可檢測(cè)大多數(shù)障礙物和識(shí)別多種車道線,能夠在車輛行駛過程中針對(duì)潛在碰撞危險(xiǎn)向駕駛員發(fā)出提醒,如駕駛員無減速動(dòng)作時(shí),
系統(tǒng)可通過控制整車制動(dòng)氣路使車輛減速,有效降低交通事故發(fā)生的概率。該系統(tǒng)還支持選裝超聲波雷達(dá),通過整合立體視覺和超聲波雷達(dá)的感知數(shù)據(jù),
提高系統(tǒng)的探測(cè)距離和魯棒性,確保系統(tǒng)在各類天氣 (雨、雪、霧)、光照(有燈光的夜晚、逆光)和道路場景(城市道路、鄉(xiāng)村道路、高速)中均能穩(wěn)定正常工作。
目前,該系統(tǒng)所包含元器件已經(jīng)通過車規(guī)級(jí)標(biāo)準(zhǔn),完全滿足前裝車廠對(duì)于乘用車 AEB 主動(dòng)安全系統(tǒng)裝車實(shí)施方案電子、電器元器件部分的標(biāo)準(zhǔn)和需求。
汽車環(huán)境感知的量產(chǎn)傳感器主要包括單目視覺、雙目立體視覺和毫米波雷達(dá)。
單目視覺為主的方案無法識(shí)別樣本數(shù)據(jù)庫中未收錄的障礙物,在城市、鄉(xiāng)村等交通場景下,漏檢、誤檢率較高。
毫米波雷達(dá)方案對(duì)非金屬障礙物、靜止障礙物、橫穿物體漏檢率較高,在城市交通場景中,雜波干擾較多。
而雙目立體視覺能夠檢測(cè)更多種類的障礙物,對(duì)城市、鄉(xiāng)村等復(fù)雜道路環(huán)境的行人、兒童、各類車輛、樹木、柵欄、錐桶、石墩、牲畜等非標(biāo)準(zhǔn)物體,
檢測(cè)的準(zhǔn)確度和測(cè)距的精準(zhǔn)度都非常高。可應(yīng)對(duì)行人橫穿、快遞騎行等場景,且具備對(duì)交通信號(hào)燈、交通標(biāo)示牌的檢測(cè)能力。
星火X1碰撞緩解制動(dòng)系統(tǒng)CMBS
《營運(yùn)貨車安全技術(shù)條件》要求重型卡車自2020年5月1日起,新出廠車輛配備AEBS相關(guān)功能。
2018年12月1日正式實(shí)施的《JT/T 617危險(xiǎn)貨物道路運(yùn)輸規(guī)則》要求:從嚴(yán)管理,加強(qiáng)企業(yè)信息化投入;
使?;肺锪髦悄芑\(yùn)行,把政府的監(jiān)管信息化、企業(yè)信息化、平臺(tái)化結(jié)合起來;
將危化品狀態(tài)智能傳感功能、道路主動(dòng)安全駕駛功能、司機(jī)防疲勞駕駛功能、車輛智能指揮調(diào)度功能等相結(jié)合形成危化物聯(lián)網(wǎng),從而平臺(tái)實(shí)時(shí)監(jiān)控,預(yù)防安全事故發(fā)生。
2018年8月發(fā)布的《交通運(yùn)輸部辦公廳關(guān)于推廣應(yīng)用智能視頻監(jiān)控報(bào)警技術(shù)的通知》也明確要求,
兩客一危車輛必須安裝符合技術(shù)規(guī)范要求的智能視頻設(shè)備,通過新產(chǎn)品、新技術(shù)、新模式進(jìn)一步降低交通事故的發(fā)生。
系統(tǒng)簡介
智慧通科技 星火X1 商用車(CMBS)碰撞緩解制動(dòng)系統(tǒng)包含前向碰撞預(yù)警(FCW- Forward Collision Warning)、
車間時(shí)距監(jiān)測(cè)(HMW-Headway Monitoring Warning)、車道偏離預(yù)警(LDW-Lane Departure Warning)、
自動(dòng)緊急制動(dòng)(AEB- Advanced Emergency Braking)等功能模塊。其主要通過前視雙目攝像頭及毫米波雷達(dá)探測(cè)前方車輛、
行人及其他障礙物相對(duì)距離、相對(duì)速度等信息,結(jié)合車輛自身的行駛軌跡及狀態(tài)來預(yù)判碰撞風(fēng)險(xiǎn),通過聲光報(bào)警提示駕駛員危險(xiǎn),在緊急情況下,
自動(dòng)剎車系統(tǒng)通過整車控制可避免碰撞事故或減輕碰撞傷害。
CMBS的主要工作原理是通過接收來自前視雙目攝像頭、毫米波雷達(dá)的環(huán)境感知信息,經(jīng)過傳感器融合算法處理后獲得準(zhǔn)確目標(biāo)類別及數(shù)量、
自車相對(duì)距離及相對(duì)速度等信息,再通過控制決策算法結(jié)合自車狀態(tài)(包括車速、轉(zhuǎn)向、制動(dòng)等),計(jì)算可能發(fā)生的碰撞時(shí)間。
系統(tǒng)可根據(jù)預(yù)碰撞時(shí)間發(fā)出聲光報(bào)警或者通過整車制動(dòng)系統(tǒng)實(shí)現(xiàn)緊急制動(dòng)。
智慧通大數(shù)據(jù)云平臺(tái)主要包括主要包括運(yùn)行大盤、車輛管理、車輛行為、設(shè)備運(yùn)維、車輛診斷等功能,
平臺(tái)通過對(duì)車輛的這些監(jiān)控幫助車輛調(diào)度管理人員實(shí)時(shí)、準(zhǔn)確 掌握車輛設(shè)備的使用信息,提升車輛管理效率。
智慧通大數(shù)據(jù)可以對(duì)駕駛員做風(fēng)險(xiǎn)評(píng)估預(yù)測(cè)、車隊(duì)安全運(yùn)維管理、車輛實(shí)時(shí)定位監(jiān)控及其他運(yùn)行數(shù)據(jù)分析,
使用了智慧通主動(dòng)安全預(yù)警系統(tǒng) (AEBS/CMBS) 及智感通大數(shù)據(jù)平臺(tái)監(jiān)管“降的車輛都能有效降低車輛碰撞風(fēng)險(xiǎn),實(shí)現(xiàn)“風(fēng)險(xiǎn)減量”本增效”的目標(biāo)。